Quick Overview: ... also developed these State space models and so we're going to utilize these State space models directly in Check out the other videos in the series: Part 1 ... This Tech Talk looks at an optimal controller called linear quadratic regulator, or
06 6 Lqr - Detailed Overview & Context
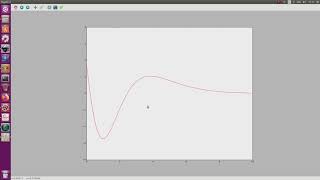
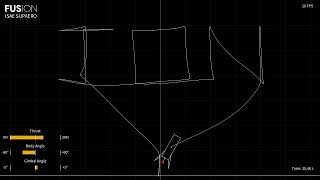
... also developed these State space models and so we're going to utilize these State space models directly in Check out the other videos in the series: Part 1 ... This Tech Talk looks at an optimal controller called linear quadratic regulator, or This video is part of the RoboJackets Software Training Program for Fall 2021. This exercise problem is taken from [1] and was a part of the exercise class for the graduate course on "Optimal and Robust ... Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the linear quadratic ...
In this video, we review the state/co-state two-point boundary value problem (BVP) and discuss the boundary conditions for free ... All right so that's basically the end of today's lecture i mean the end of the things that i want to talk about so we introduced this In this video, we derive the optimal controller that solves the Optimal (linear quadratic) control (also known as linear quadratic regulator or In this video we introduce the linear quadratic regulator ( University of Utah: ME EN 5210/6210 & CH EN 5203/6203 State-Space Control Systems The correct sequence to watch these ...
In this interactive animated video we will explain what is the Linear Quadratic Regulator (in short





![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](https://i.ytimg.com/vi/1_UobILf3cc/mqdefault.jpg)