Quick Overview: Presented at IROS 2016 Authors: Edward Johns, Stefan Leutenegger, and Andrew Davison Paper: ... This video introduces PINNs, or Physics Informed In this video, we dive into the world of autoencoders, a fundamental concept in
Deep Learning A Grasp Function - Detailed Overview & Context
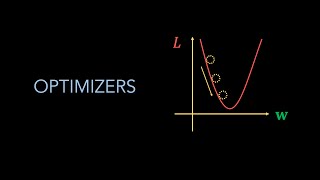
Presented at IROS 2016 Authors: Edward Johns, Stefan Leutenegger, and Andrew Davison Paper: ... This video introduces PINNs, or Physics Informed In this video, we dive into the world of autoencoders, a fundamental concept in Object grasping using deep learning and point cloud An introduction to two fundamental concepts in Here we cover six optimization schemes for
A seminar I gave for the Physiology and Pharmacology department at the University of Western Ontario on January 20, 2020. ICRA 2018 Spotlight Video Interactive Session Thu AM Pod O.7 Authors: Baweja, Harjatin; Parhar, Tanvir; Jenkins, Merritt; Kantor, ... In this Video, we will show the two service robots using an unknown Accompanying video for the publication "Tactile Shortform link: ===== My name is Artem, I'm a neuroscience PhD student at Harvard University. Help fund future projects: An equally valuable form of support is to share the videos.
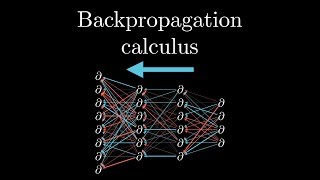
What are the neurons, why are there layers, and what is the math underlying it? Help fund future projects: ... ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.7 Authors: Quillen, Deirdre; Jang, Eric; Nachum, Ofir; Finn, Chelsea; ...

![Physics Informed Neural Networks (PINNs) [Physics Informed Machine Learning]](https://i.ytimg.com/vi/-zrY7P2dVC4/mqdefault.jpg)