Quick Overview: This is DDP with Nonlinear Constraints [1] [1] Affiliation: 4th-year undergraduate student, Daniel Guggenheim School of Aerospace Engineering, Georgia Institute of ... Highly Dynamic Maneuvers computed by Feasible-prone Differential Dynamic Programming
Differential Dynamic Programming With Nonlinear - Detailed Overview & Context
This is DDP with Nonlinear Constraints [1] [1] Affiliation: 4th-year undergraduate student, Daniel Guggenheim School of Aerospace Engineering, Georgia Institute of ... Highly Dynamic Maneuvers computed by Feasible-prone Differential Dynamic Programming Lecture 11 for Optimal Control and Reinforcement Learning (CMU 16-745) 2023 by Prof. Zac Manchester. Topics: - DDP details + ... In this video, we go over five steps that you can use as a framework to solve Highly Dynamic Maneuvers computed by Feasible-driven Differential Dynamic Programming
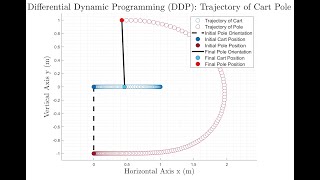
Application of DDP to an inverted pendulum system. Authors: Yuval Tassa, Nicolas Mansard, Emo Todorov Article published in IEEE ICRA 2014 (Hong Kong) ... Differential Dynamic Programming (DDP): Cart Pole