Quick Overview: Dieses Video zeigt ein paar visuelle Eindrücke zum Paper " Authors: Christian Kunert, Tobias Schwandt, and Wolfgang Broll Abstract: Real-time capable simultaneous localization and ... This video provides a clear, step-by-step tutorial on how to filter and clean a
Efficient Point Cloud Rasterization For - Detailed Overview & Context
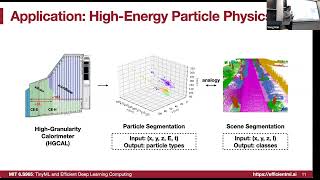
Dieses Video zeigt ein paar visuelle Eindrücke zum Paper " Authors: Christian Kunert, Tobias Schwandt, and Wolfgang Broll Abstract: Real-time capable simultaneous localization and ... This video provides a clear, step-by-step tutorial on how to filter and clean a You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... To alleviate this situation a large body of work has been carried out to develop both This video provides a short overview of our recent paper "Vote3Deep: Fast Object Detection in 3D
This video presents a new hands-on formation dedicated to providing you with focused content, immediately applied through an ... Get 7x PDF for 3D Data Tutorials here: The average LiDAR scan contains 250+ million ... How To Guide covering how to use CloudCompare ( to add a hillshade effect to a Chasing Clouds: Differentiable Volumetric Rasterisation of Talk video for Micro 2021 paper: "PointAcc: Institute for Computer Graphics and Virtual Reality at the University of Bremen
Join us for HPG 2024 in Denver, USA, with SIGGRAPH, July 26-28, 2024. Sign up for conference emails at ...













![PointAcc: Efficient Point Cloud Accelerator, [MICRO 2021]](https://i.ytimg.com/vi/-wB0BYxgmSE/mqdefault.jpg)



![[AutoMLConf'22]: Searching Efficient Dynamic Graph CNN for Point Cloud](https://i.ytimg.com/vi/U0CkwM8H7Wo/mqdefault.jpg)