Quick Overview: Arsalan Mousavian, Clemens Eppner, Dieter Fox Accepted in ICCV 2019. Generating ICRA 2018 Spotlight Video Interactive Session Thu PM Pod E.2 Authors: Schmidt, Philipp; Vahrenkamp, Nikolaus; Waechter, ... ICRA 2018 Spotlight Video Interactive Session Wed PM Pod E.3 Authors: Choi, Changhyun; Schwarting, Wilko; DelPreto, Joseph; ...
Fuzzy Depth Objects Grasping Based - Detailed Overview & Context
Arsalan Mousavian, Clemens Eppner, Dieter Fox Accepted in ICCV 2019. Generating ICRA 2018 Spotlight Video Interactive Session Thu PM Pod E.2 Authors: Schmidt, Philipp; Vahrenkamp, Nikolaus; Waechter, ... ICRA 2018 Spotlight Video Interactive Session Wed PM Pod E.3 Authors: Choi, Changhyun; Schwarting, Wilko; DelPreto, Joseph; ... Authors: A. Ramisa, G. Alenyà, F. Moreno-Noguer and C. Torras Voice: A. Ramisa ... Hardware demos from the project titled "Generalizable Robotic This paper presents a motion planning algorithm that enables robots to efficiently pick up
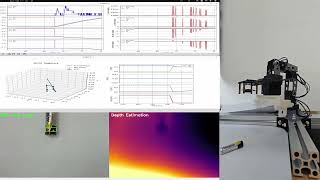
The video shows an application of a vision-guided robotic In this paper, we propose a multi-view deep learning approach to handle robust Upon the advent of Industry 4.0, collaborative robotics and intelligent automation gain more and more traction for enterprises to ... Carl Winge's reimplementation of the paper - "Sample Efficient Guest Lecture in DeepRob CSCI5980: Deep Learning for Robot Perception and Manipulation by Prof. Yu Xiang, UT Dallas ... This system uses a single RGB camera for monocular