Quick Overview: GRIM: Task-Oriented Grasping with Conditioning on Generative Examples Supplementary video for CoRL 2020 Paper: Same Object, Different Tool manipulation is vital for facilitating robots to complete challenging
Grim Task Oriented Grasping With - Detailed Overview & Context
GRIM: Task-Oriented Grasping with Conditioning on Generative Examples Supplementary video for CoRL 2020 Paper: Same Object, Different Tool manipulation is vital for facilitating robots to complete challenging A. Nguyen, D. Kanoulas, D. G. Caldwell, and N. G. Tsagarakis, “Preparatory Object Reorientation for Peter K. Allen Professor of Computer Science Department of Computer Science, Columbia University November 30, 2018 ... DexGANGrasp: Dexterous Generative Adversarial
Demonstration of the humanoid robot ARMAR III (KIT) Is AI actually intelligent, or are we just falling for a very convincing trick? Cognitive scientist, entrepreneur, and bestselling author ... Demonstration of the humanoid robot ARMAR III (KIT) and Tombatossals (UJI) D. Song, C. H. Ek, K. Huebner, D. Kragic (2011). Multivariate Discretization for Bayesian Network Structure Learning in Robot ... In a 32-year plus career in the Intelligence Community, Carmen Medina made many different types of intelligence mistakes and ... Clinical AI fails where context matters most: across encounters, modalities, and time. Vector search retrieves fragments. Clinical ...
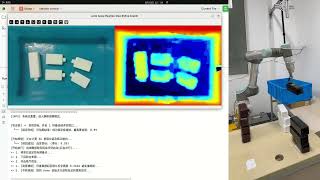
Want to learn more about Want to learn more about Generative AI + Machine Learning? Read the ebook here ... After successful planning and target selection, the robotic arm initiates its Grip-that-there”: An Investigation of Explicit and Implicit