At a Glance: This video explains how we can define boundary conditions for multiple intermediate positions (waypoints) in order to generate a ... This is my work with my colleague on using neural networks to learn minimum snap optimization for
Lecture 34 Trajectory Generation For 17797 -
This video explains how we can define boundary conditions for multiple intermediate positions (waypoints) in order to generate a ... This is my work with my colleague on using neural networks to learn minimum snap optimization for Introduction to Reinforcement Learning and PPO for robotics VLA for autonomous driving series
Important details found
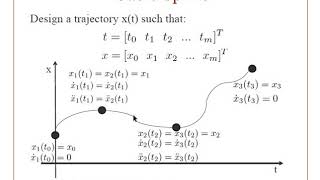
- This video explains how we can define boundary conditions for multiple intermediate positions (waypoints) in order to generate a ...
- This is my work with my colleague on using neural networks to learn minimum snap optimization for
- Introduction to Reinforcement Learning and PPO for robotics VLA for autonomous driving series
- Paul Ladinig, Bernhard Rinner, Stephan Weiss: Time and Energy Optimized
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes Lecture 34 Trajectory Generation For 17797 and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Topic Gallery








Sponsored