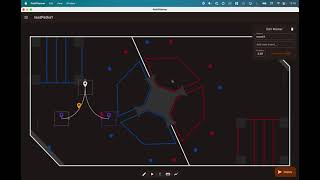
Quick Overview: The sixth video in the INTRODUCTORY programming In the final video of the swerve drive series, we'll program autonomous movement demonstration of how to leverage the new event markers, stop points, and path groups in
Lesson 5 Using Pathplanner And - Detailed Overview & Context
The sixth video in the INTRODUCTORY programming In the final video of the swerve drive series, we'll program autonomous movement demonstration of how to leverage the new event markers, stop points, and path groups in An episode of the Sunday night FRC Roundtable for FIRST Robotics students and mentors. Team 2052 KnightKrawler student ... In this video, I introduce our new VEX V5 Quadtree algorithm for grid generation, A-Star search for path finding and line-of-sight-algorithm for path smoothing. Implemented ...
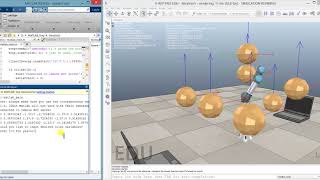
Student: Tejas Hemant Thosani (thosani2) In this simulation, the UR3 robot arm implements path planning to plan a non-trivial ...