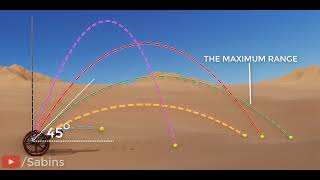
Quick Overview: Yeah okay and so what we can do today is try to Okay let's jump back in i want to pick up where we left out left off talking about Let's understand the fundamentals of projectile motion from this video.
Mini Lecture 10 Trajectory Stabilization - Detailed Overview & Context
Yeah okay and so what we can do today is try to Okay let's jump back in i want to pick up where we left out left off talking about Let's understand the fundamentals of projectile motion from this video. Contact constraints, such as those between a foot and the ground or a hand and an object, are inherent in many robotic tasks. Professor Stephen Boyd, of the Stanford University Electrical Engineering department, We show that the systems can not only be linearised about points, but also
What's super interesting is that even if your system is losing sometimes you can still