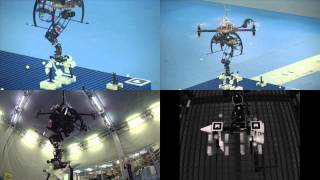
Quick Overview: This experiments demonstrates Kinodynamic Planning combined with Aliakbarpour, H., Tahri, O., & Araujo, H. (2014). In this work, we present a pipeline to perform real-time tracking and grasping of a dynamic target by an autonomous
Mobile Manipulator Robot Visual Servoing - Detailed Overview & Context
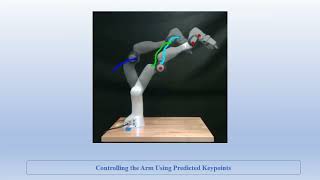
This experiments demonstrates Kinodynamic Planning combined with Aliakbarpour, H., Tahri, O., & Araujo, H. (2014). In this work, we present a pipeline to perform real-time tracking and grasping of a dynamic target by an autonomous This video clip illustrates a research activity of the This video is a supplementary material for the following paper: Keypoints-Based Adaptive Visual Servoing for Robot Manipulators - Individual Project
This thesis use the digital signal processor and image processing methods to construct a real-time RBE 550 Sample based paper reading submission. A demonstration of a control method known as