Quick Overview: Lingyu Ma, Soon-Jo Chung, and Seth Hutchinson, " Unmanned Aerial Vehicles (UAVs) have been widely used in precision farming and identified as one of the most efficient robots ... Find out more information about this project and links to download the report at,
Monocular Vision Based Navigation Using - Detailed Overview & Context
Lingyu Ma, Soon-Jo Chung, and Seth Hutchinson, " Unmanned Aerial Vehicles (UAVs) have been widely used in precision farming and identified as one of the most efficient robots ... Find out more information about this project and links to download the report at, Tutorials: Part1: Zigzag environment ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.7 Authors: Nishimura, Haruki; Schwager, Mac Title: Active ... Junho Yang, Ashwin Dani, Soon-Jo Chung, and Seth Hutchinson, "
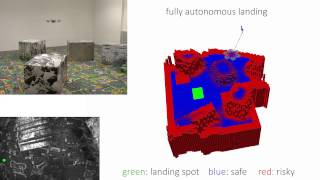
J. Yang, D. Rao, S.-J. Chung, and S. Hutchinson, " A monocular based navigation approach for UAV safe and autonomous In this paper, we propose a resource-efficient system for real-time 3D terrain reconstruction and landingspot detection for micro ... Video associated with our IEEE RA-L paper: MonoMPC: Learning mobile vehicle traversability in monocular-vision based local navigation Inkyu Sa, Hu He, Van Huynh and Peter Corke, "
This is the course project for Image Processing & Computer The challenges of guiding satellites in deep-space Gesture based Piloting of an Aerial Robot using Monocular Vision



![[Tello] Monocular vision based autonomous navigation using ORB_SLAM2, Packnet-sfm and Fast-Planner 2](https://i.ytimg.com/vi/ciuxBRWLidI/mqdefault.jpg)

![[Tello] Monocular vision based autonomous navigation using ORB_SLAM2, Packnet-sfm and Fast-Planner 1](https://i.ytimg.com/vi/TcpziH_DZm0/mqdefault.jpg)
![[Tello] Monocular vision based autonomous navigation using ORB_SLAM2, Packnet-sfm and Fast-Planner 3](https://i.ytimg.com/vi/7_xltBBQRZg/mqdefault.jpg)