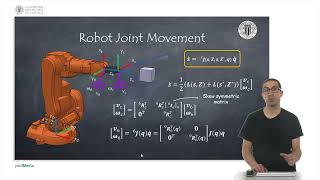
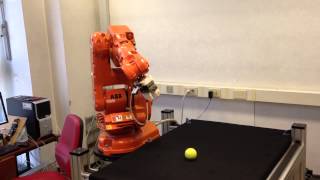
Quick Overview: This video is the internal view of the camera used to A demonstration of a control method known as 6D Image-based Dynamic Visual Servoing for Robot Manipulators with Uncalibrated Stereo Cameras
Robot Image Based Visual Servoing - Detailed Overview & Context
This video is the internal view of the camera used to A demonstration of a control method known as 6D Image-based Dynamic Visual Servoing for Robot Manipulators with Uncalibrated Stereo Cameras Preliminary test PBVS contro of an ABB IRB140 using OpenCV. Robust Image-Based Visual Servoing with Field-of-View Constraints Nonlinear model predictive control (NMPC) is employed to regulate the position and yaw of the quadrotor relative to a ground ...