Quick Overview: Paper: IRL-Lab: To aid humans in everyday tasks, robots need to ... In this paper, we study the problem of task-oriented A robot working in human-centric environments needs to know which kind of
Scene Representation And Object Grasping - Detailed Overview & Context
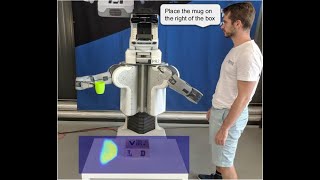
Paper: IRL-Lab: To aid humans in everyday tasks, robots need to ... In this paper, we study the problem of task-oriented A robot working in human-centric environments needs to know which kind of In this paper, we propose a multi-view deep learning approach to handle robust This video presents the interplay of all the vision modules for the system presented in this workshop paper. As robots become more widely available outside industrial settings, the need for reliable
Spring 2021: Robotics Colloquium Current state-of-the-art CNNs localize rare Vincent Sitzmann from MIT, presented a talk in the MERL Seminar Series on March 30, 2022. Abstract: Given only a single picture, ... Oier Mees, Alp Emek, Johan Vertens, Wolfram Burgard IEEE International Conference on Robotics and Automation (ICRA), Paris, ...















![[MERL Seminar Series Spring 2022] Self-Supervised Scene Representation Learning](https://i.ytimg.com/vi/aamNYlpvQnM/mqdefault.jpg)