Page Summary: RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Lahijanian, “Conflict-Based Search for Explainable Multi-Agent Path Finding,” in Int'l Conference ...
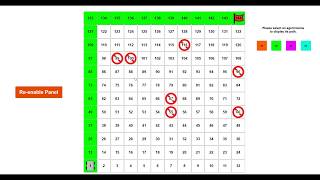
The Easiest Mapf Algorithm Prioritised 28030 -
RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Lahijanian, “Conflict-Based Search for Explainable Multi-Agent Path Finding,” in Int'l Conference ... Created by Kamyar Ghiam and Anish Krishnan: Kamyar Ghiam: kamyarghiam.com Anish Krishnan: ...
Important details found
- RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ...
- Lahijanian, “Conflict-Based Search for Explainable Multi-Agent Path Finding,” in Int'l Conference ...
- Created by Kamyar Ghiam and Anish Krishnan: Kamyar Ghiam: kamyarghiam.com Anish Krishnan: ...
- This video shows the fundamental features of Multi Agent Path Finding (
Why this topic is useful
This topic is useful when readers need a quick overview first, then want to move into supporting details and related references.
Frequently Asked Questions
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes The Easiest Mapf Algorithm Prioritised 28030 and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.