Main Takeaway: They might be collaborative and easy to use, but the robot arms manufactured by Universal Robots (all 37000 of them) have ... Supervisor: Professor Alireza Akbarzadeh The video clip is obtained from my MSc thesis at FUM Robotics Lab, Ferdowsi ...
Ur10 Singularity Avoidance 22564 -
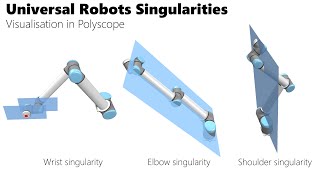
They might be collaborative and easy to use, but the robot arms manufactured by Universal Robots (all 37000 of them) have ... Supervisor: Professor Alireza Akbarzadeh The video clip is obtained from my MSc thesis at FUM Robotics Lab, Ferdowsi ... In this video our application engineer will explain the different types of robot arm
Important details found
- They might be collaborative and easy to use, but the robot arms manufactured by Universal Robots (all 37000 of them) have ...
- Supervisor: Professor Alireza Akbarzadeh The video clip is obtained from my MSc thesis at FUM Robotics Lab, Ferdowsi ...
- In this video our application engineer will explain the different types of robot arm
- Accompanied video for the paper presented in Human-Friendly Robots, HFR 2020.
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes Ur10 Singularity Avoidance 22564 and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Topic Gallery









Sponsored