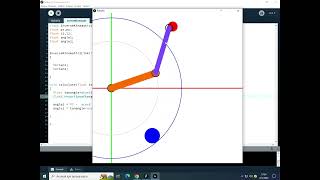
Quick Overview: Join us for a broad discussion about Forward Using kinematics in processing to control a Delta Robot Visualisation of the Trajectory equation. User sets X,Y target. Random angle. Calculate required initial velocity.
Using Kinematics In Processing To - Detailed Overview & Context
Join us for a broad discussion about Forward Using kinematics in processing to control a Delta Robot Visualisation of the Trajectory equation. User sets X,Y target. Random angle. Calculate required initial velocity. Need PCBs or assembly service for your project? PCB prototypes are only $5 for 10 boards This is part of group coursework ROCO507Z MSc Robotics Batch SEP22. Source code: Song: Danosongs - The Owl Named Orion.
Bulding a skeleton, setting some end effectors Description In this video I explain how to make inverse Visual Components - Human Inverse Kinematics (FABRIK algorithm) work with Process Modeling Lecture 7 is divided into 3 parts. Part A explores the workspaces of 3-link robots: Part B applies ...