Quick Overview: Predictive Observer-Based Dual-Rate Prescribed Performance Control for 6D Image-based Dynamic Visual Servoing for Robot Manipulators with Uncalibrated Stereo Cameras Authors: Griffin, Brent* Description: This paper addresses the problem of mobile
Visual Servoing For Robot Manipulators - Detailed Overview & Context
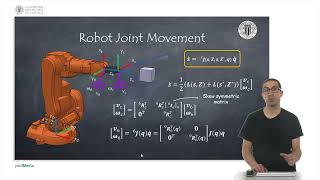
Predictive Observer-Based Dual-Rate Prescribed Performance Control for 6D Image-based Dynamic Visual Servoing for Robot Manipulators with Uncalibrated Stereo Cameras Authors: Griffin, Brent* Description: This paper addresses the problem of mobile Visual Servoing for Robot Manipulators - Individual Project This video is a supplementary material for the following paper: Keypoints-Based Adaptive This video is the internal view of the camera used to
Image features, image feature velocity, interaction matrix, camera motion estimation, proportional image-based A Project Video Report Submitted in Partial Fulfillment of the Requirements For the Degree of Bachelor of Engineering in Real-Time Safe and Smooth Visual Servoing for Robot Manipulators via Reinforcement Learning Basics of computer-vision for image-based control of This video explains how to implement robot image-based For more information about this project please visit our lab website: