Main Takeaway: Authors: Cristian Ioan Vasile (1), Xiao Li (2) and Calin Belta (2) (1) Department of Mechanical Engineering and Mechanics, Lehigh ... This video shows a framework for automatically generating optimal action-level behavior for a team of robots based on
Advanced 6 Planning With Temporal Logic -
Authors: Cristian Ioan Vasile (1), Xiao Li (2) and Calin Belta (2) (1) Department of Mechanical Engineering and Mechanics, Lehigh ... This video shows a framework for automatically generating optimal action-level behavior for a team of robots based on A recording of a talk held by Jana Tumova in the IRLab seminar series at University of Birmingham on 04 June 2021.
Important details found
- Authors: Cristian Ioan Vasile (1), Xiao Li (2) and Calin Belta (2) (1) Department of Mechanical Engineering and Mechanics, Lehigh ...
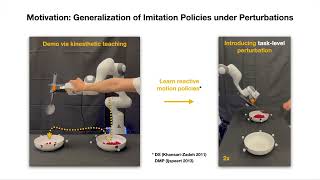
- This video shows a framework for automatically generating optimal action-level behavior for a team of robots based on
- A recording of a talk held by Jana Tumova in the IRLab seminar series at University of Birmingham on 04 June 2021.
- MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ...
- Learning from demonstration (LfD) has succeeded in tasks featuring a long time horizon.
Why this topic is useful
Readers often search for Advanced 6 Planning With Temporal Logic because they want a clearer explanation, related examples, and a practical way to continue exploring the topic.
Frequently Asked Questions
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.