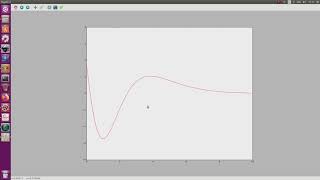
Quick Summary: In this section, the linearized engagement problem statement defined in Section 1 is identified as a special form of the finite ... Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the
Core Concepts Linear Quadratic Regulators -
In this section, the linearized engagement problem statement defined in Section 1 is identified as a special form of the finite ... Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the In this video, we derive the optimal controller that solves the LQR problem in continuous time.
Important details found
- In this section, the linearized engagement problem statement defined in Section 1 is identified as a special form of the finite ...
- Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the
- In this video, we derive the optimal controller that solves the LQR problem in continuous time.
- Lecture 7 for Optimal Control and Reinforcement Learning 2022 by Prof.
Why this topic is useful
This topic is useful when readers need a quick overview first, then want to move into supporting details and related references.
Frequently Asked Questions
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Core Concepts Linear Quadratic Regulators and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.




![Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]](https://i.ytimg.com/vi/1_UobILf3cc/mqdefault.jpg)