At a Glance: AUTHORS: Stefan Stevšić , Otmar Hilliges IN PROCEEDINGS International Conference on 3D Vision (3DV), 2020 The task of ... Presentation O-2B-04 of European Conference on Computer Vision 2018, Munich Germany Webpage: Title: ...
Deepim Deep Iterative Matching For 6d Pose Estimation -
AUTHORS: Stefan Stevšić , Otmar Hilliges IN PROCEEDINGS International Conference on 3D Vision (3DV), 2020 The task of ... Presentation O-2B-04 of European Conference on Computer Vision 2018, Munich Germany Webpage: Title: ... MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Robust
Important details found
- AUTHORS: Stefan Stevšić , Otmar Hilliges IN PROCEEDINGS International Conference on 3D Vision (3DV), 2020 The task of ...
- Presentation O-2B-04 of European Conference on Computer Vision 2018, Munich Germany Webpage: Title: ...
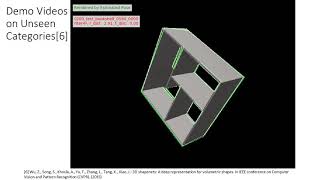
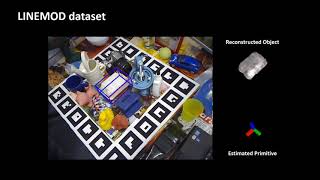
- MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Robust
- Authors: Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton, Andrew J.
Why this topic is useful
This topic is useful when readers need a quick overview first, then want to move into supporting details and related references.
Frequently Asked Questions
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Deepim Deep Iterative Matching For 6d Pose Estimation and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.