Main Takeaway: In this session, we describe the challenges of lifting object-based representations from sensor data from egocentric devices. We present a framework for efficient inference in structured image models that explicitly reason about objects.
Fast Scene Understanding -
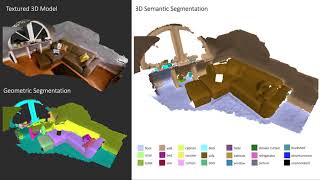
In this session, we describe the challenges of lifting object-based representations from sensor data from egocentric devices. We present a framework for efficient inference in structured image models that explicitly reason about objects. Here is a result of Semantic Point Cloud representation, made on Flyvast www.flyvast.com.
Important details found
- In this session, we describe the challenges of lifting object-based representations from sensor data from egocentric devices.
- We present a framework for efficient inference in structured image models that explicitly reason about objects.
- Here is a result of Semantic Point Cloud representation, made on Flyvast www.flyvast.com.
- In computer vision applications such as mobile robotics and autonomous driving, 3D
- Demo video of Spatial Sampling Network on Cityscapes dataset demo video sequence.
Why this topic is useful
The goal of this page is to make Fast Scene Understanding easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Fast Scene Understanding and connects it with related entries, references, and supporting context.