Quick Summary: In this video, we will build a simulation of a parallel manipulator (in other words, a 'simulator of a simulator') in This is a project for ECE 470 in University of Illinois - Urbana, Champaign.
Generalized Inverse Kinematics Solver In Python -
In this video, we will build a simulation of a parallel manipulator (in other words, a 'simulator of a simulator') in This is a project for ECE 470 in University of Illinois - Urbana, Champaign. Detailed guide to making IK systems: Procedural sound effects for games: ...
Important details found
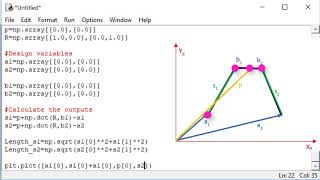
- In this video, we will build a simulation of a parallel manipulator (in other words, a 'simulator of a simulator') in
- This is a project for ECE 470 in University of Illinois - Urbana, Champaign.
- Detailed guide to making IK systems: Procedural sound effects for games: ...
- This video show the DH table for the Stanford Manipulator and then does
Why this topic is useful
The goal of this page is to make Generalized Inverse Kinematics Solver In Python easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Generalized Inverse Kinematics Solver In Python and connects it with related entries, references, and supporting context.