Quick Context: In the previous chapter, we have shown how to design controllers for linear systems. Here we discuss the stability of a linear system (in continuous-time or discrete-time) in terms of eigenvalues.
Linearizing Around A Fixed Point Control Bootcamp -
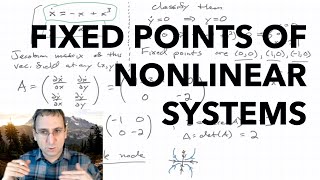
In the previous chapter, we have shown how to design controllers for linear systems. Here we discuss the stability of a linear system (in continuous-time or discrete-time) in terms of eigenvalues. This video describes how to analyze fully nonlinear differential equations by analyzing the
Important details found
- In the previous chapter, we have shown how to design controllers for linear systems.
- Here we discuss the stability of a linear system (in continuous-time or discrete-time) in terms of eigenvalues.
- This video describes how to analyze fully nonlinear differential equations by analyzing the
- This lecture describes how to obtain linear system of equations for a nonlinear system by
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes Linearizing Around A Fixed Point Control Bootcamp and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Related Images
![Linearizing Around a Fixed Point [Control Bootcamp]](https://i.ytimg.com/vi/1YMTkELi3tE/mqdefault.jpg)




![Stability and Eigenvalues [Control Bootcamp]](https://i.ytimg.com/vi/h7nJ6ZL4Lf0/mqdefault.jpg)



Sponsored