Topic Brief: This video shows the results of our papers titled "Secure state estimation under sensor attacks: A The video shows a simple example of a time minimal trajectory subject to linear temporal logic (
Ltl Motion Planning Using Satisfiability Modulo Convex Programming -
This video shows the results of our papers titled "Secure state estimation under sensor attacks: A The video shows a simple example of a time minimal trajectory subject to linear temporal logic ( This video shows the results of our paper titled "DoS-Resilient Multi-Robot Temporal Logic
Important details found
- This video shows the results of our papers titled "Secure state estimation under sensor attacks: A
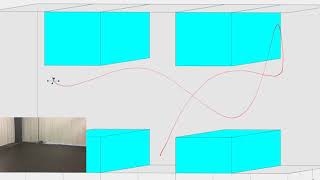
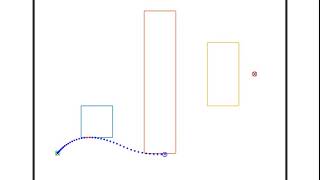
- The video shows a simple example of a time minimal trajectory subject to linear temporal logic (
- This video shows the results of our paper titled "DoS-Resilient Multi-Robot Temporal Logic
- This work presents gusto a framework for guaranteed sequential directory optimization
- A brief visual summary of the paper by Vince Kurtz and Hai Lin, There is no audio.
Why this topic is useful
The goal of this page is to make Ltl Motion Planning Using Satisfiability Modulo Convex Programming easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Ltl Motion Planning Using Satisfiability Modulo Convex Programming and connects it with related entries, references, and supporting context.