Main Takeaway: This application of Model Predictive Control (MPC) seeks to control the level in a gravity drained tank by adjusting inlet valves. This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536 Online ISSN: 1558-0865 Digital ...
Mixed Integer Nonlinear Programming Based Multi Vehicle Multi Robot Motion Planning -
This application of Model Predictive Control (MPC) seeks to control the level in a gravity drained tank by adjusting inlet valves. This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536 Online ISSN: 1558-0865 Digital ... ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.4 Authors: Aceituno-Cabezas, Bernardo; Mastalli, Carlos; Dai, ...
Important details found
- This application of Model Predictive Control (MPC) seeks to control the level in a gravity drained tank by adjusting inlet valves.
- This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536 Online ISSN: 1558-0865 Digital ...
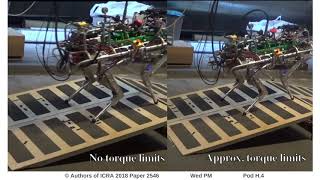
- ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.4 Authors: Aceituno-Cabezas, Bernardo; Mastalli, Carlos; Dai, ...
- MERL intern Mohit Srinivasan, MERL researchers Ankush Chakrabarty, Rien Quirynen and Stefano Di Cairano, and MELCO ...
- TU Delft Delft Center for Systems and Control (DCSC) Colloquia Series – Recording Welcome to the official ...
Why this topic is useful
The goal of this page is to make Mixed Integer Nonlinear Programming Based Multi Vehicle Multi Robot Motion Planning easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Mixed Integer Nonlinear Programming Based Multi Vehicle Multi Robot Motion Planning and connects it with related entries, references, and supporting context.

![[MECC 2021] Fast Multi-Robot Motion Planning via Imitation Learning of Mixed-Integer Programs](https://i.ytimg.com/vi/biAXMLil7hw/mqdefault.jpg)