Main Takeaway: This 3-hour video covers most concepts in the first two semesters of calculus, primarily Differentiation and Integration. Abstract: 6D pose estimation of textureless objects is a valuable but challenging task for many robotic applications.
Mod 06 Lec 28 Visual Performance -
This 3-hour video covers most concepts in the first two semesters of calculus, primarily Differentiation and Integration. Abstract: 6D pose estimation of textureless objects is a valuable but challenging task for many robotic applications. So, initially you would see a slope of one and then slowly the slope will start tailoring down because of these
Important details found
- This 3-hour video covers most concepts in the first two semesters of calculus, primarily Differentiation and Integration.
- Abstract: 6D pose estimation of textureless objects is a valuable but challenging task for many robotic applications.
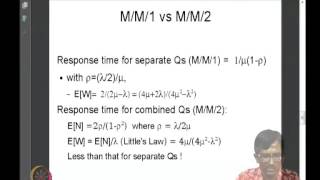
- So, initially you would see a slope of one and then slowly the slope will start tailoring down because of these
- Sanjeev K Aggarwal,Department of Computer Science and Engineering,IIT Kanpur.For more details on ...
- Gopinath,Department of Computer Science and Engineering,IISc Bangalore.For more details on ...
Why this topic is useful
The goal of this page is to make Mod 06 Lec 28 Visual Performance easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Mod 06 Lec 28 Visual Performance and connects it with related entries, references, and supporting context.