Topic Brief: Alessandro Morra, Dominik Mannhart, Lionel Gulich, Victor Klemm from ETH Zurich use 3D space-time grid, cost function ... 0:44 Implementing SLAM 1:44 Frontier Exploration 2:31 Pathfinding 3:07 Pure Pursuit 4:10
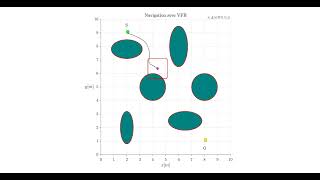
Obstacle Avoidance Algorithm -
Alessandro Morra, Dominik Mannhart, Lionel Gulich, Victor Klemm from ETH Zurich use 3D space-time grid, cost function ... 0:44 Implementing SLAM 1:44 Frontier Exploration 2:31 Pathfinding 3:07 Pure Pursuit 4:10 This short video details the methods and results from a model predictive control based
Important details found
- Alessandro Morra, Dominik Mannhart, Lionel Gulich, Victor Klemm from ETH Zurich use 3D space-time grid, cost function ...
- 0:44 Implementing SLAM 1:44 Frontier Exploration 2:31 Pathfinding 3:07 Pure Pursuit 4:10
- This short video details the methods and results from a model predictive control based
- robotics It takes a significant amount of time and energy to create these free video ...
Why this topic is useful
The goal of this page is to make Obstacle Avoidance Algorithm easier to scan, compare, and understand before opening related resources.
Sponsored
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Obstacle Avoidance Algorithm and connects it with related entries, references, and supporting context.
Supporting Images









Sponsored