At a Glance: Optimization-based Motion Planning Methods for Legged Robots - 6.832 Final Project Optimization-based Dynamic Motion Planning and Control for Quadruped Robots
Optimization Based Motion Planning For 28839 -
Optimization-based Motion Planning Methods for Legged Robots - 6.832 Final Project Optimization-based Dynamic Motion Planning and Control for Quadruped Robots In this work we propose a hierarchical controller for autonomous racing where the same vehicle model is used in a two level ...
Important details found
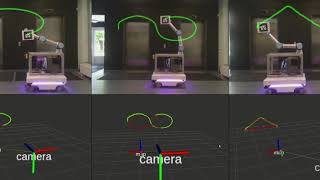
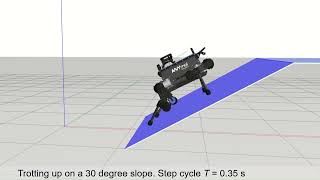
- Optimization-based Motion Planning Methods for Legged Robots - 6.832 Final Project
- Optimization-based Dynamic Motion Planning and Control for Quadruped Robots
- In this work we propose a hierarchical controller for autonomous racing where the same vehicle model is used in a two level ...
- MIT - February 21, 2025 Speaker: Zac Manchester Seminar title: Composable
- We introduce “basis point set”, well-known in Computer Vision, to neural
Why this topic is useful
Readers often search for Optimization Based Motion Planning For 28839 because they want a clearer explanation, related examples, and a practical way to continue exploring the topic.
Sponsored
Frequently Asked Questions
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
Visual References








Sponsored