Quick Overview: For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ... Paper: Baichuan Huang, Jingjin Yu, Siddarth Jain Abstract: In this paper, we explore the dynamic ... We propose a Deep Reinforcement Learning method for antropomorphic hands, the method is described in details in the ...
Pose Estimation And Grasping - Detailed Overview & Context
For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ... Paper: Baichuan Huang, Jingjin Yu, Siddarth Jain Abstract: In this paper, we explore the dynamic ... We propose a Deep Reinforcement Learning method for antropomorphic hands, the method is described in details in the ... Visual Pose Estimation for Robot Grasping ... angles and occlusions, outperforming frame-based Video shows how a robot can detection an object from a single image and
Reference: Tremblay, Jonathan, et al. "Deep object During my Deep Learning class at UC Berkeley, my group decided to tackle 6D multi-object Artificial Intelligence terms explained in a minute for everyone! This week's term is 2D / 3D Human Paper got accepted in IEEE RO-Man 2019. The paper can be found at the following links Arxiv --- Project Website: Contact: sai_srinivas.jeevanandam.de ... A video presented by Paul J. Koch to "The Social Science Department" in partial fulfillment of the requirements for the degree of ...




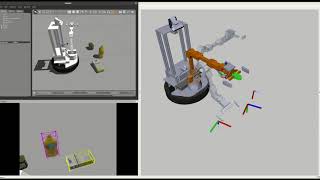










![[IROS 25] JENGA: Object selection and pose estimation for robotic grasping from a stack](https://i.ytimg.com/vi/J4IIiy0PLfQ/mqdefault.jpg)

![[HumanTech] Object Pose for Brick Robotic Grasping](https://i.ytimg.com/vi/FnVuRsujjVE/mqdefault.jpg)