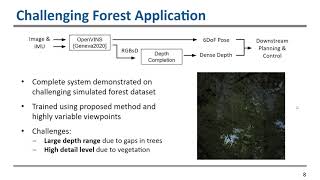
Quick Overview: Accepted to ICRA2021. Abstract: In this work we augment our prior state-of-the-art Accepted to ICRA 2021. In this work we augment our prior state-of-the-art VIO system, OpenVINS, with the capability to produce ... Demo video using two non-overlapped fisheye cameras to improve the
Robust Monocular Visual Inertial Depth - Detailed Overview & Context
Accepted to ICRA2021. Abstract: In this work we augment our prior state-of-the-art Accepted to ICRA 2021. In this work we augment our prior state-of-the-art VIO system, OpenVINS, with the capability to produce ... Demo video using two non-overlapped fisheye cameras to improve the ICRA 2018 Spotlight Video Interactive Session Wed AM Pod V.7 Authors: Sun, Ke; Mohta, Kartik; Pfrommer, Bernd; Watterson, ... More demonstrations can be seen in followings: * Project website: * Three kinds of feature detection and ... Reference: J. Delmerico, D. Scaramuzza A Benchmark Comparison of
[Monocular Visual-Inertial State Estimation] -- Experiment-4-Grove Video for the ICRA 2021 submission. VID-Fusion:



![[2022,IROS]Towards Robust Visual-Inertial Odometry with Multiple Non-Overlapping Monocular Cameras](https://i.ytimg.com/vi/r7QvPth1m10/mqdefault.jpg)










![[Monocular Visual-Inertial State Estimation] -- Experiment-4-Grove](https://i.ytimg.com/vi/K4wRFUo6C9o/mqdefault.jpg)

