Topic Brief: We generally cannot achieve all of our goals simultaneously for example we may not be able to make our In the previous example we saw that we employed the open-loop frequency response for performing our
System Dynamics And Control Module 22d Designing For Robustness -
We generally cannot achieve all of our goals simultaneously for example we may not be able to make our In the previous example we saw that we employed the open-loop frequency response for performing our In addition to noise and disturbances and model uncertainty another thing that we wish our
Important details found
- We generally cannot achieve all of our goals simultaneously for example we may not be able to make our
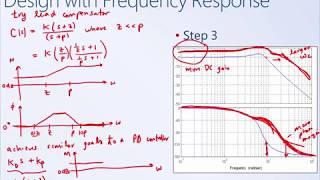
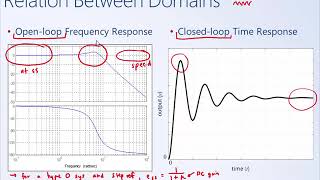
- In the previous example we saw that we employed the open-loop frequency response for performing our
- In addition to noise and disturbances and model uncertainty another thing that we wish our
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes System Dynamics And Control Module 22d Designing For Robustness and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Image References








Sponsored