Quick Overview: Subject : Mechanical Engineering and Science Course Name : Mechanics and Control of Robotic Manipulators Welcome to ... And there is a time at which we have these uh two positions we want to join these two ME, UTSA MATLAB files and notes: (see Spring 2019)
Lecture 32 Trajectory Generation Using - Detailed Overview & Context
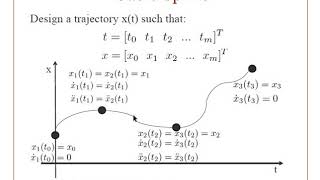
Subject : Mechanical Engineering and Science Course Name : Mechanics and Control of Robotic Manipulators Welcome to ... And there is a time at which we have these uh two positions we want to join these two ME, UTSA MATLAB files and notes: (see Spring 2019) ICRA 2018 Spotlight Video Interactive Session Tue AM Pod G.4 Authors: Robinson, D. Reed; Mar, Robert T.; Estabridis, Katia; ... This video explains how we can define boundary conditions for multiple intermediate positions (waypoints) in order to To access the translated content: 1. The translated content of this course is available in regional languages. For details please ...