Quick Summary: From Flat Minima to Numerically Nonvacuous Generalization Bounds via PAC-Bayes (Talk) The goal of machine learning algorithms is to produce predictors having the smallest possible risk (expected loss).
Pac Bayes Control For Obstacle Avoidance -
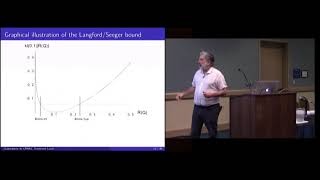
From Flat Minima to Numerically Nonvacuous Generalization Bounds via PAC-Bayes (Talk) The goal of machine learning algorithms is to produce predictors having the smallest possible risk (expected loss). Talk by Pascal Germain at NIPS 2012 Workshop Multi-trade-off in Machine Learning.
Important details found
- From Flat Minima to Numerically Nonvacuous Generalization Bounds via PAC-Bayes (Talk)
- The goal of machine learning algorithms is to produce predictors having the smallest possible risk (expected loss).
- Talk by Pascal Germain at NIPS 2012 Workshop Multi-trade-off in Machine Learning.
- This short video details the methods and results from a model predictive
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes Pac Bayes Control For Obstacle Avoidance and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Supporting Images









Sponsored