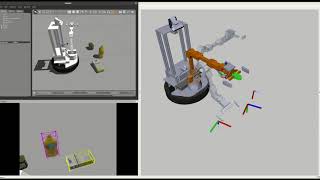
Quick Overview: Authors: Dániel Horváth, Kristóf Bocsi, Gábor Erdős, and Zoltán Istenes preprint: MERL Researcher Siddarth Jain and MERL intern Baichuan Huang presented their paper titled "EARL: Eye-on-Hand ... Paper got accepted in IEEE RO-Man 2019. The paper can be found at the following links Arxiv ---
Sim2real Grasp Pose Estimation For - Detailed Overview & Context
Authors: Dániel Horváth, Kristóf Bocsi, Gábor Erdős, and Zoltán Istenes preprint: MERL Researcher Siddarth Jain and MERL intern Baichuan Huang presented their paper titled "EARL: Eye-on-Hand ... Paper got accepted in IEEE RO-Man 2019. The paper can be found at the following links Arxiv --- We describe different strategies to compute Simultaneous Semantic and Collision Learning for 6-DoF Grasp Pose Estimation (IROS2022)Learning 6 DoF Task oriented Grasp Detection viaImplicit Estimation and Visual Affordance
... angles and occlusions, outperforming frame-based Authors: Enric Corona, Albert Pumarola, Guillem Alenyà, Francesc Moreno-Noguer, Grégory Rogez Description: The rise of deep ... 발표일: 2023. 08. 10. 발표자: 신승희 제목: Machine learning and pose estimation for autonomous grasping with collaborative robots We propose a Deep Reinforcement Learning method for antropomorphic hands, the method is described in details in the ... Artificial Intelligence terms explained in a minute for everyone! This week's term is 2D / 3D Human
Presented at IROS 2016 Authors: Edward Johns, Stefan Leutenegger, and Andrew Davison Paper: ...

![[IROS 2023] EARL: Eye-on-Hand Reinforcement Learner for Dynamic Grasping with Active Pose Estimation](https://i.ytimg.com/vi/81jbwcbhOVs/mqdefault.jpg)